
Mind Claw
A Brainwave-Controlled Soft Robotic System

-- Role --
Project Lead, Design Engineer
-- team --
Zumeng Liu, Daheng Chu
-- Timeline --
Dec, 2022
5 Weeks
5 Weeks
-- Background --
This was a five-week project from the Cyber-Physical module of my master's program. Our team of three worked on connecting brainwaves to a soft robotic system.
-- Skills --
Arduino, Processing, Machine Learning
-- Problem Definition --
-- HMW --
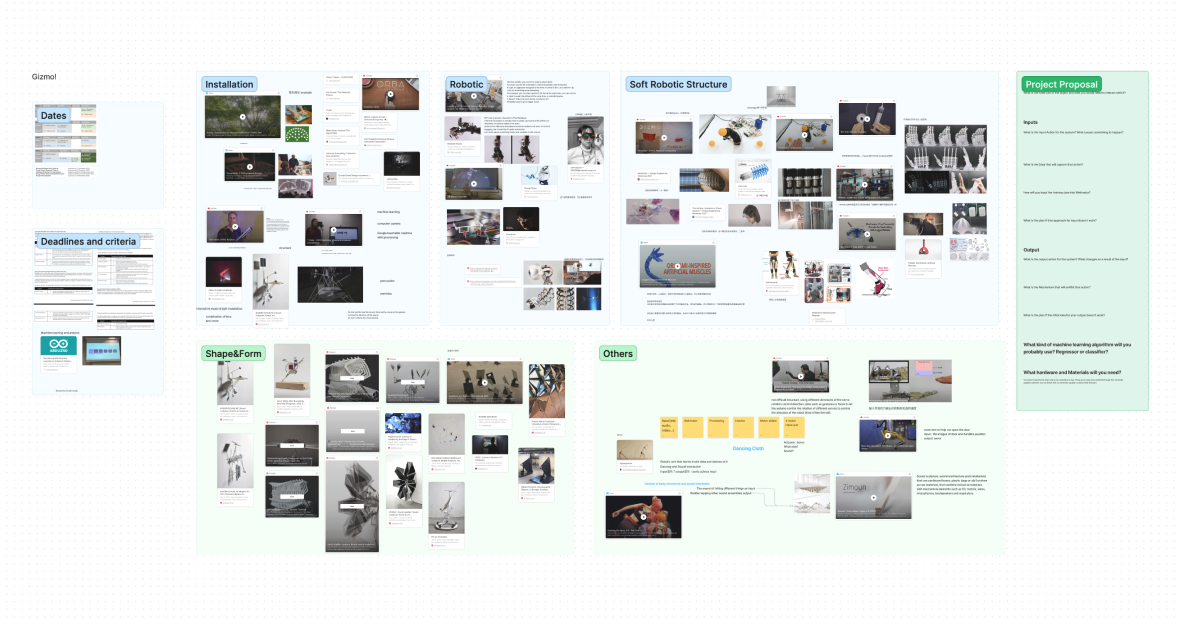
-- Research --
-- Opportunity --
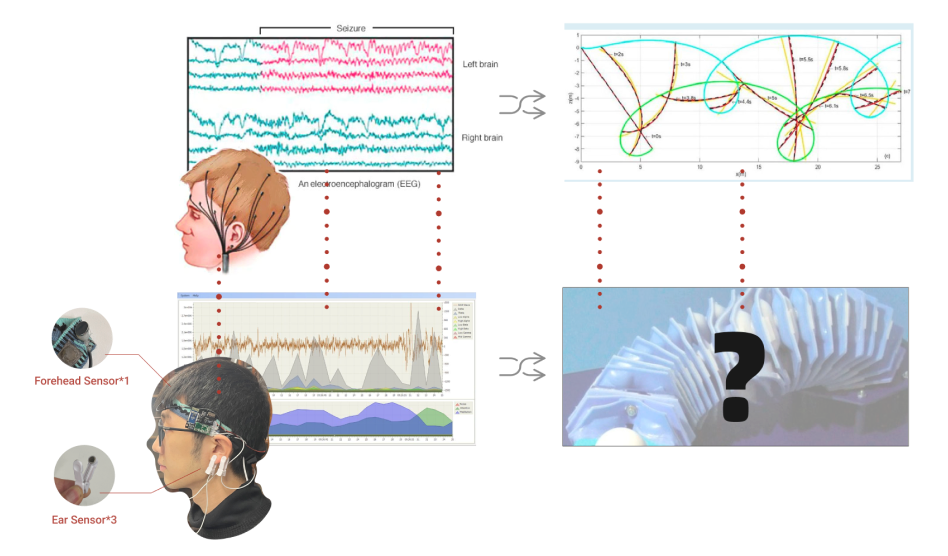
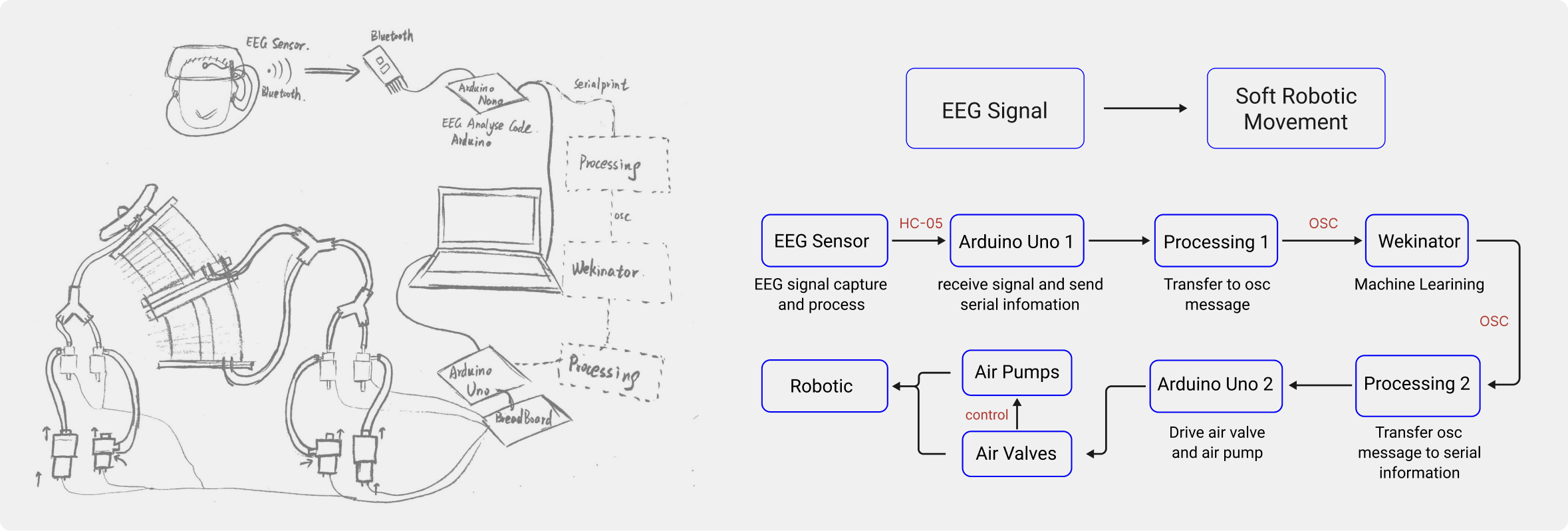
We found a abstract parallel between the EEG graph patterns and the movement graph patterns of soft robots. This sparked our interest in developing a mind-controlled robotic system. From there, we started to envision a system with some simple mind-to-robot projections.
-- Ideation --
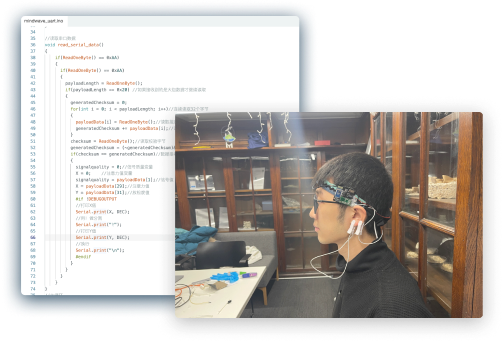
Our concept started with using EEG sensors to capture brainwaves and translate them into commands for controlling a soft robot with a pump system. The signals were transmitted through Arduino boards.
-- Test --

We used Wekinator to create a classifier that linked specific brainwave patterns to commands for the robot’s pumps and valves, using Dynamic Time Warping (DTW) to standardize EEG signals across different users. Our dataset consisted of labeled brainwave patterns from the three of us, corresponding to two brain states: Focus and Chill.
The processed signals were then utilized to control the robot through pumps and valves, controlled by one of the Arduino boards.
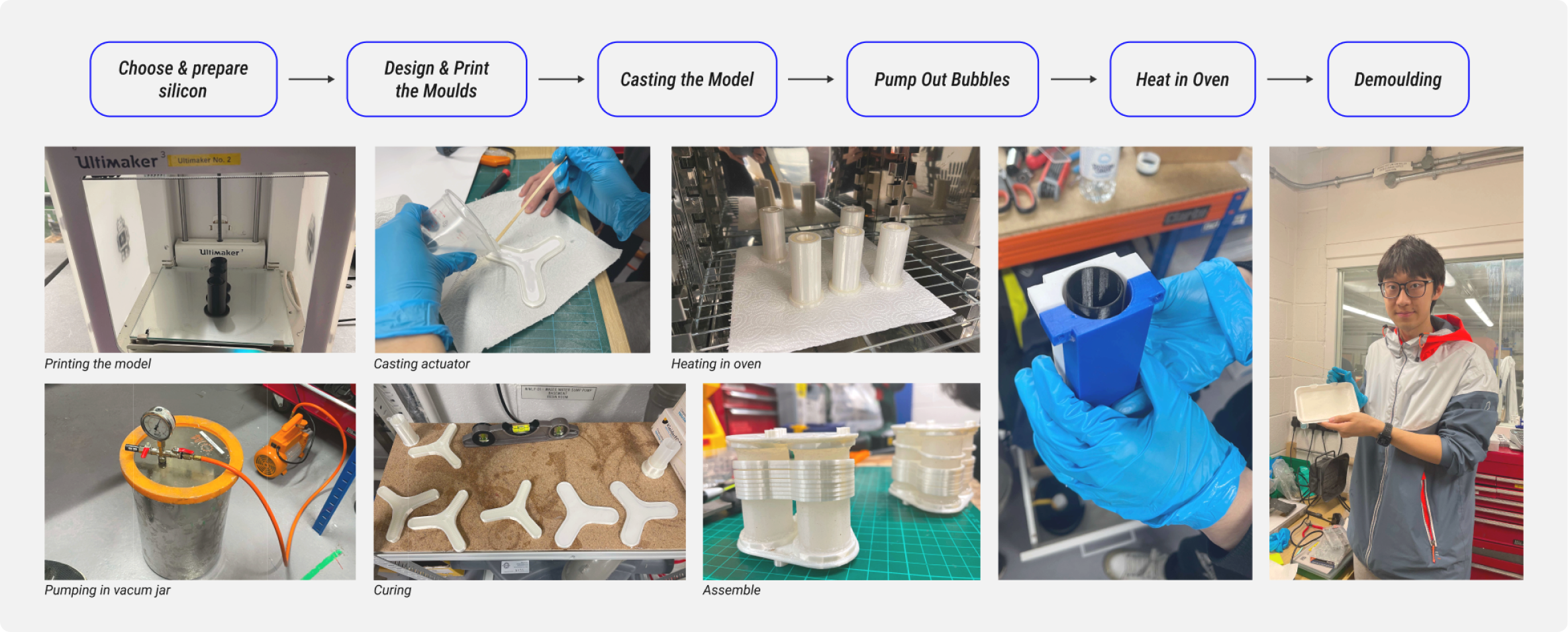
-- Fabrication --
We built the soft robot system at the Morph Lab, Imperial College London, learning through many failures including poor air-tightness, uneven chambers, internal bubbles and more. This experience gave us valuable hands-on skills in building silicone systems.
-- Prototype I --
-- Prototype II --
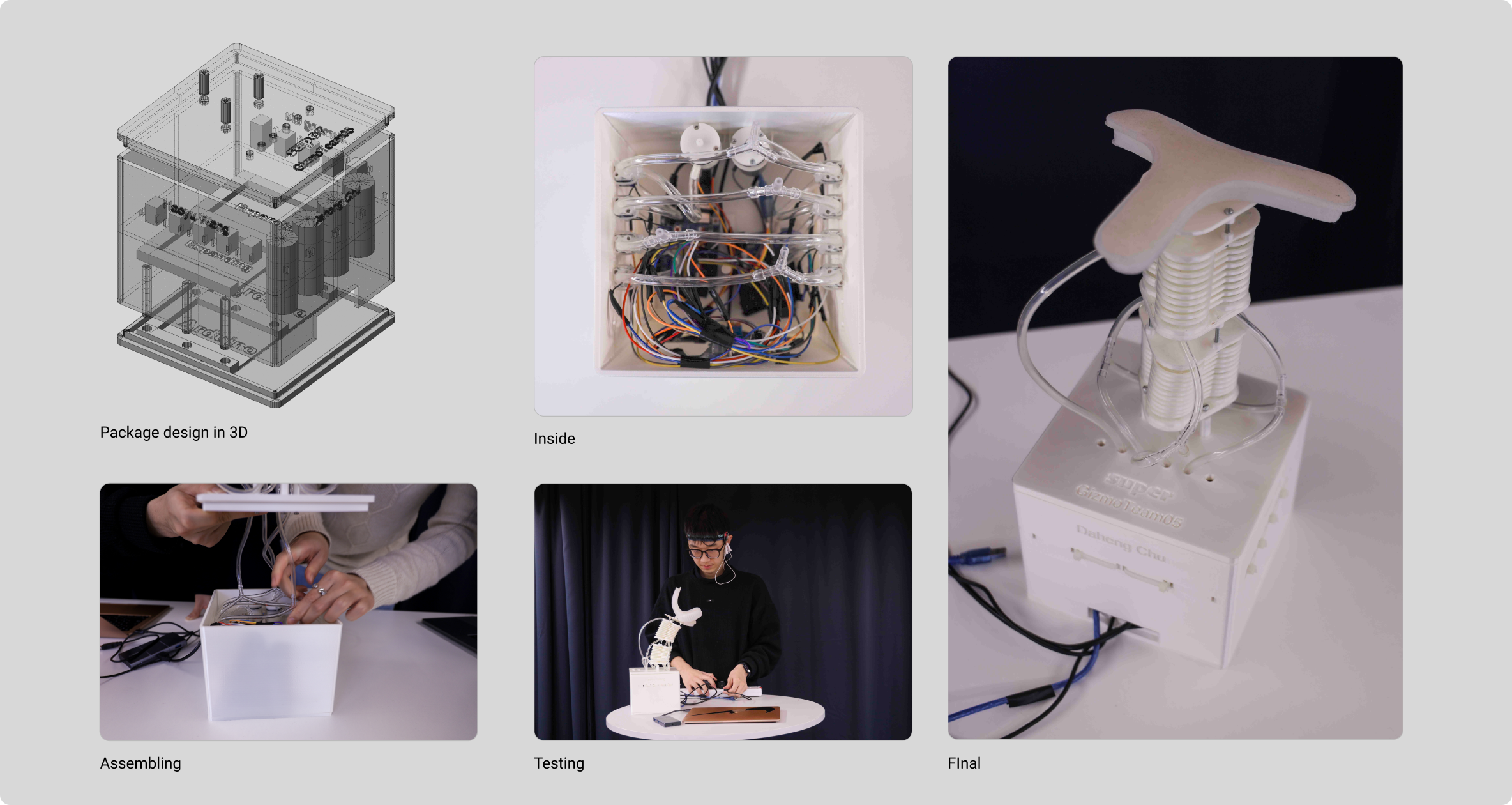
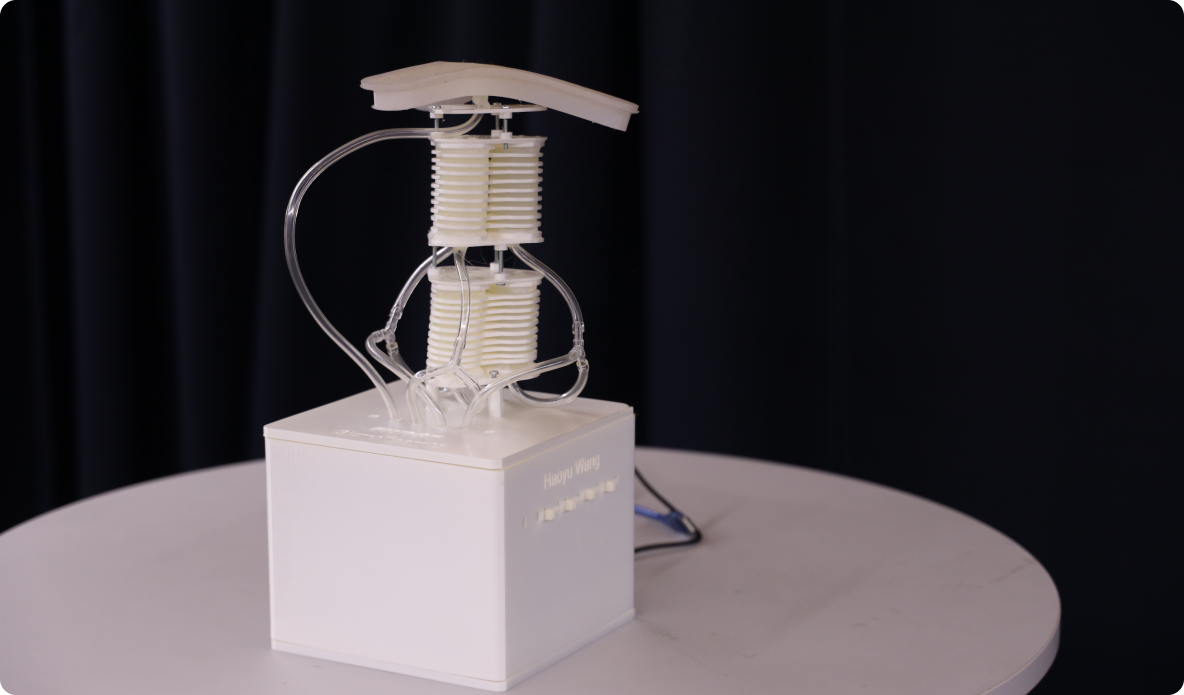
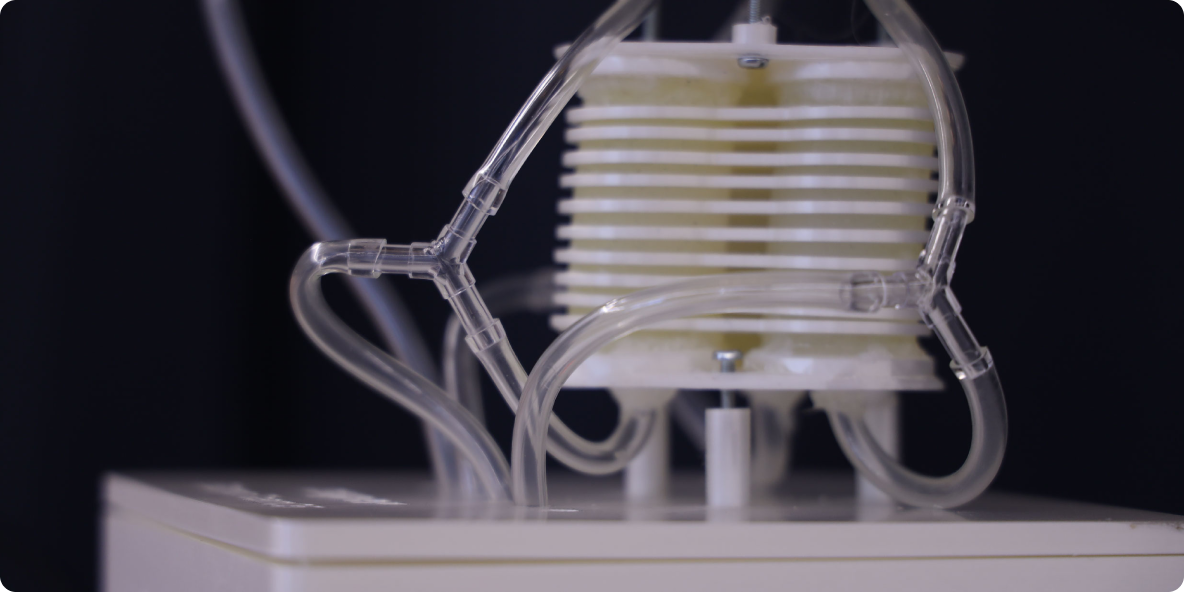
-- Final --

-- Showcase --